RobInLab

“El comportamiento inteligente del robot, clave en la robótica del futuro”
Angel Pascual del Pobil
Catedrático de Inteligencia Artificial. Director del Laboratorio de Inteligencia Robótica (RobInLab)
Con casi tres décadas de trayectoria, el Laboratorio de Inteligencia Robótica de la Universidad Jaume I de Castellón (RobInLab UJI) realiza investigación, desarrollo y formación en robótica cognitiva, denominada también inteligencia robótica, entendida como inteligencia artificial encarnada en sistemas robóticos que generan acciones en el mundo físico real: sistemas ciberfísicos.

¿Qué debe entenderse por inteligencia robótica?¿Qué es un sistema ciberfísico?
Simplificando, diría que la inteligencia robótica es inteligencia artificial pero con una parte de física. Su parte mecánica sería la robótica. Modernamente, un robot se considera un sistema ciberfísico porque tiene una parte de computación y además está conectado a Internet; y tiene un comportamiento, que podríamos llamar inteligencia. Eso es lo que le diferenciaría de la telerobótica, que por ejemplo sería capaz de trasmitir las instrucciones quirúrgicas para operar a distancia. La inteligencia, sin embargo, significa que el robot tiene autonomía. Su comportamiento es inteligente.
En ese marco ¿Qué investigan?
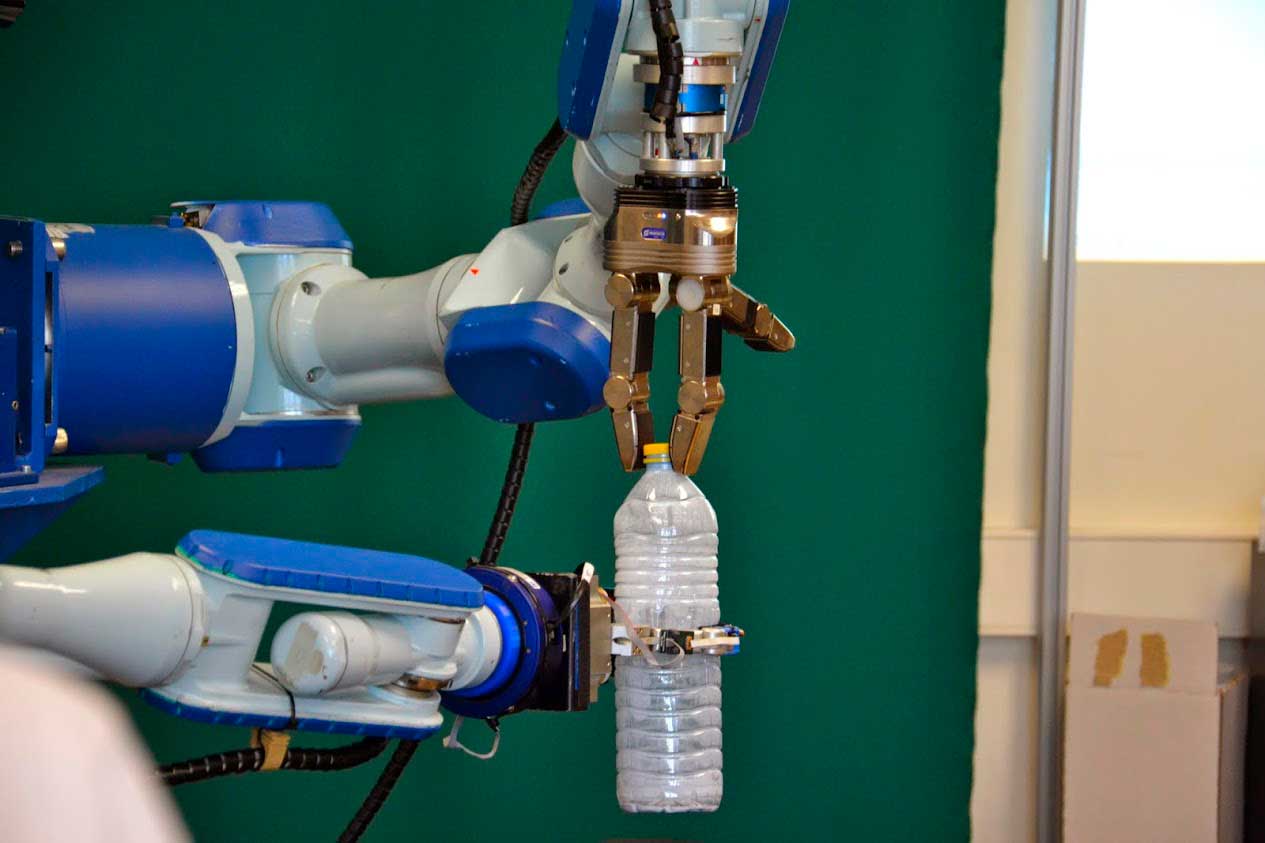
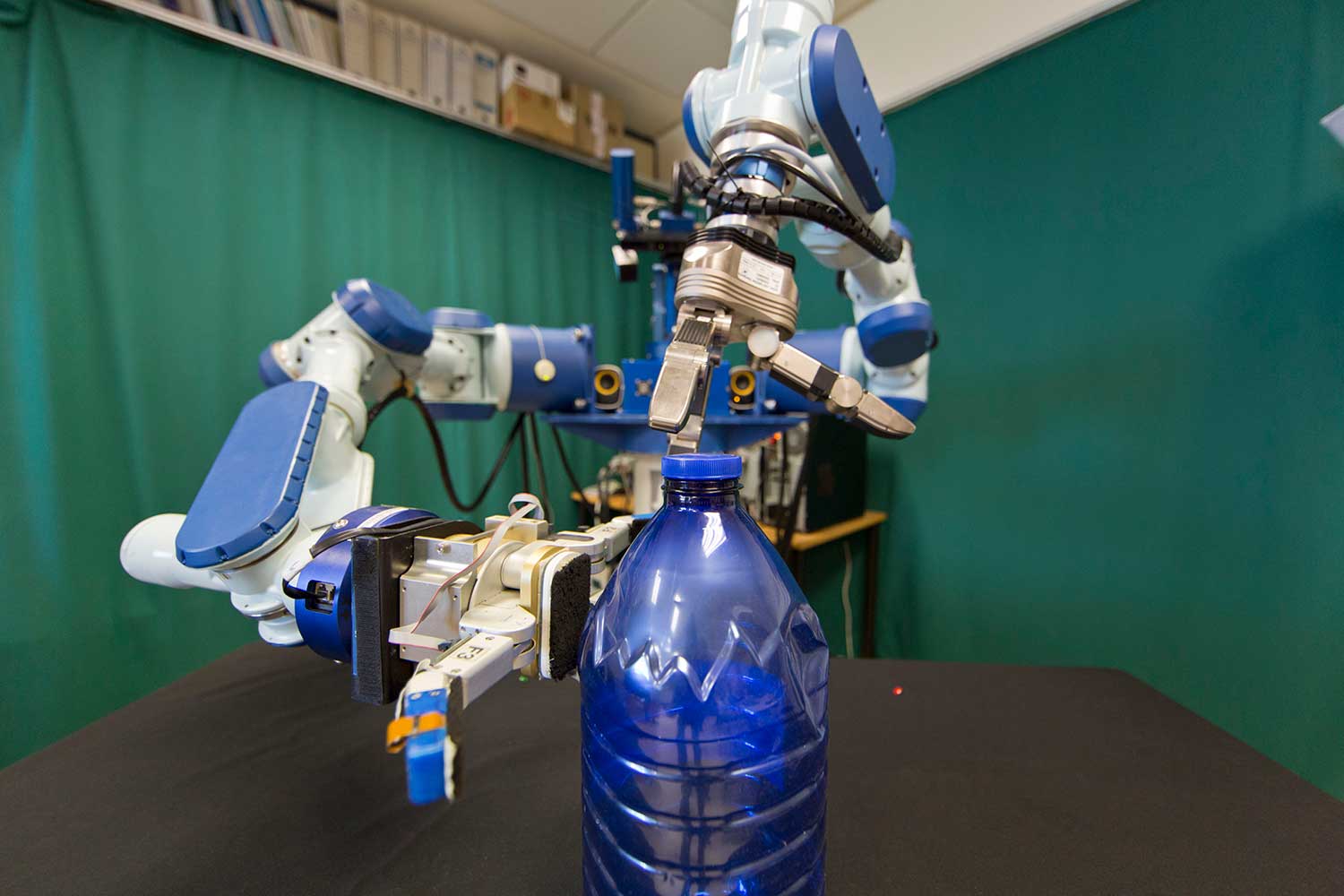
Desde el principio, RobInLab se ha orientado hacia la «inteligencia manual», esto es, la que se basa en la coordinación sensorial-motora de brazos, manos y sistemas de percepción artificial, como cámaras o sensores de tacto, para realizar tareas que requieren tanto inteligencia como destreza manual. Porque hace falta inteligencia para tener destreza manual. Y un robot tiene que tener destreza: si tiene que acompañar por ejemplo a una persona con necesidades especiales y no puede abrir una puerta o un cajón, pues no podrá ayudarle.
En esta línea, RobInLab ha participando en diversos proyectos internacionales y sus sistemas de manipulación perceptual han tenido un impacto considerable. Cabe destacar que el laboratorio fue uno de los miembros fundadores de EURON, la red de excelencia europea de robótica, y es muy conocido dentro y fuera de Europa con colaboraciones habituales con prestigiosas universidades.
¿Qué proyectos destacables han desarrollado en los últimos años?
Los proyectos que ha desarrollado el grupo en los últimos años han sido financiados por la Comisión Europea, el Plan Nacional y como Grupo de Excelencia del Programa Prometeo de la Generalitat Valenciana. En el primero de ellos, se desarrolló el Robot Bibliotecario de la UJI, capaz de buscar y extraer un libro en la biblioteca del campus. Luego, en el proyecto europeo EYESHOTS, intentamos replicar en robots los comportamientos humanos relacionados con la visión, el agarre de objetos y la percepción espacial, habiendo desarrollado un avanzado sistema visual tridimensional que se sincroniza con los brazos y que permiten al robot percibir, tomar conciencia de lo que le rodea y recordarlo para actuar en consecuencia. Hemos validado las conclusiones con el torso robótico humanoide Tombatossals, desarrollado en la Universidad Jaume I.
En RobInLab trabajamos también en el proyecto europeo GRASP, centrado en el agarre robótico. El objetivo fue demostrar que el prototipo de robot logra vaciar una cesta de la compra con objetos de diferente tamaño y forma sin que se caigan.
¿Cómo se trabaja para llegar a esos desarrollos?
Habitualmente, para desarrollar nuestros modelos computacionales, partimos de los conocimientos de la biología animal o humana, para lo cual aunamos los esfuerzos de especialistas en neurociencias, psicología, robótica e ingeniería. Nuestro trabajo tiene, por tanto, un enfoque multidisciplinar. Así, el estudio del control de la visión se inició en la Universidad de Bolonia, registrando las neuronas de monos dedicadas a la coordinación visuo-motora, ya que nuestra forma de percibir el mundo es similar a la de los primates. A partir de los registros neuronales propusimos modelos computacionales de la parte del cerebro que integra las imágenes con los movimientos tanto de ojos, como de brazos y que se corresponden con lo aprendido durante las etapas de desarrollo infantil, que una de nuestras investigadoras estudió en la Universidad de Indiana.

¿La investigación en inteligencia robótica tiene también aplicación en el ámbito industrial?
Sí claro. En el sector industrial la robótica inteligente tiene infinidad de posibilidades. El conocimiento que generamos es útil, por ejemplo, en los almacenes de los gigantes de la venta online. Cuando se mueven millones de artículos ya no vale una estrategia clásica industrial. Hace falta inteligencia manual. La experiencia adquirida nos ha servido para iniciar nuevos proyectos financiados por el Programa Estatal de Investigación, Desarrollo e Innovación orientado a los Retos de la Sociedad, como RoboPicker, DEVALHAND y BENCH-HAND. RoboPicker aborda el problema de la automatización de la operación de recogida -o picking- de artículos en almacenes de empresas de venta online. Se trata de que un sistema con brazos robóticos seleccione visualmente, entre los objetos presentes en un estante de inventario, aquellos que forman parte de un pedido, los coja y los deposite en una cesta para su empaquetado y envío al cliente. Así, el año pasado fuimos uno de los 16 equipos de todo el mundo seleccionados para competir en el Amazon Robotics Challenge, celebrado en Japón. DEVALHAND persigue el diseño y evaluación de manos artificiales antropomorfas con el fin de mejorar el diseño y control de manos protésicas y robóticas, en colaboración con el grupo de investigación en Biomecánica de la UJI. Y BENCH-HAND hace una evaluación experimental de manos artificiales para mejorarlas.
¿Algún otro campo de aplicación especialmente remarcable?
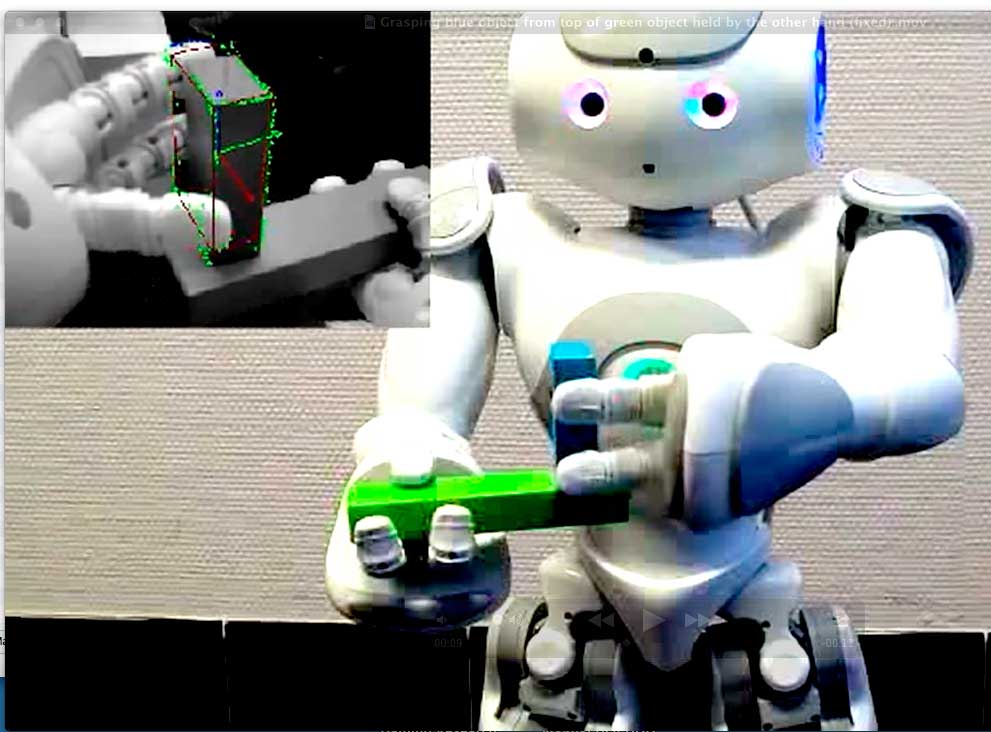
Sí, los robots sociales y educativos. Se trata de lograr una interacción humano-robot de cara a conseguir que los robots humanoides generen respuestas emocionales adecuadas en las personas con las que interactúen. Con un enfoque terapéutico, hay evidencias que sugieren que el uso de robots, por su comportamiento predecible y menor número de estímulos, puede ser beneficioso para la terapia de niños con Trastornos del Espectro Autista. Otro escenario de aplicación persigue identificar los comportamientos del robot que generen respuestas emocionales positivas de los usuarios.
También abordamos la robótica educativa, en concreto el uso de robots para que niños y adolescentes se sientan atraídos por la programación.
Avanzar en todos nuestros campos de trabajo nos permitirá responder en el futuro a los nuevos retos de la robótica.
¿Llevan a cabo también actividades de formación?
Estamos muy implicados en una educación de alto nivel. Así, la Universidad Jaume I es miembro del consorcio del Máster Erasmus Mundus en Robótica Avanzada (EMARO), que en 2017 recibió la cifra récord de más de 700 solicitudes de 82 países para optar a las 15 becas que concede la Comisión Europea. Por otra parte, desde 2001 Robinlab ha organizado 13 escuelas de verano internacionales con financiación europea y de Estados Unidos. La capacidad formativa y reconocimiento internacional de RobInLab atrae a estudiantes de todo el mundo.

Galería





Videos
Compartir